EtherCAT Master Stack
Overview
The EtherCAT master stack by IgH is used for open source projects for automation of systems such as Robot Operating System (ROS) and LinuxCNC. Applications of an open source–based EtherCAT master system reduces cost and makes application program development flexible. Based on the native, Intel made the following optimizations:
Support for Linux* Kernel 5.x/6.x
Support for Preempt RT
Migration to the latest IGB/IGC/mGBE driver to stack
EtherCAT Master User Space Stack
The EtherCAT Master User Space Stack is an optimized version of the IgH EtherCAT Master Stack designed to run in user space on systems with the Preempt RT patch. This optimization eliminates the need for ioctl system calls, which can introduce latency, thereby improving performance. By maintaining all APIs from the original IgH EtherCAT Master Stack, this user space stack ensures compatibility with existing EtherCAT application programs, allowing for seamless integration and transition.
Key features of the EtherCAT Master User Space Stack include:
Latency Improvement: By avoiding ioctl system calls, the stack reduces latency, which is crucial for real-time applications.
Compatibility: The stack retains all APIs from the original IgH EtherCAT Master Stack, ensuring that existing EtherCAT applications can run without modification.
Containerization: The stack is designed to be easily containerized, facilitating deployment in modern software environments that use containers for isolation and scalability.
Multiple Master Support: The stack supports multiple EtherCAT masters, allowing for complex network configurations and improved scalability.
Overall, this user space stack provides a robust solution for real-time EtherCAT applications, offering improved performance and flexibility while maintaining compatibility with existing software.
EtherCAT Enablekit
EtherCAT Enablekit streamlines the configuration and development of EtherCAT systems by offering a comprehensive set of tools and APIs. It simplifies the setup of EtherCAT masters, slaves, and network topology, allowing developers to focus on application logic rather than low-level configuration details. With Ecat EnableKit, building robust EtherCAT applications becomes faster and more efficient.
Key features of the EtherCAT Enablekit include:
Built on the IgH EtherCAT Master Stack
Supports both Preempt-RT and Xenomai/Dovetail real-time frameworks
Provides utilities to parse EtherCAT Network Information (ENI) files
Includes tools for parsing EtherCAT Slave Information (ESI) files
Offers user-friendly APIs for rapid EtherCAT application development
Supplies example code for controlling EtherCAT IO slaves
Includes example code for operating EtherCAT CoE slaves (SOE currently not supported)
The architecture is as following:
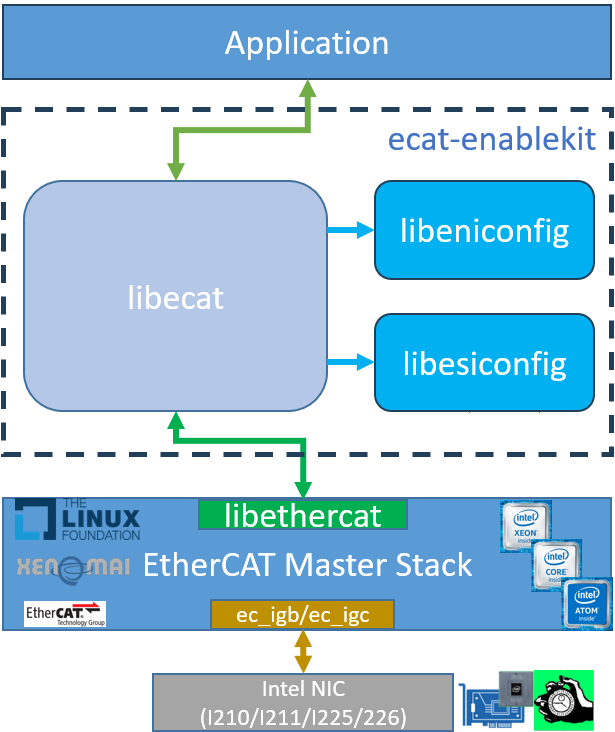
Packages
The EtherCAT master stack currently contains the following packages:
ighethercat:
This package contains ethercat start/stop service script, utility tool and configuration files for kernel space EtherCAT Stack.
ighethercat-dpdk:
This package contains ethercat utility tool and configuration files for user space EtherCAT Stack.
ighethercat-dkms:
This package contains dynamic kernel module for kernel space EtherCAT master module and optimized EtherCAT driver modules for Intel network solutions(IGB/IGC/stmmac)
ighethercat-examples:
This package contains various examples demonstrating use of EtherCAT(kernel space)
ighethercat-dpdk-examples:
This package contains various examples demonstrating use of EtherCAT(user space)
ecat-enablekit:
This package provides a library to enhance IgH EtherCAT Master Stack(kernel space) to support ENI(EtherCAT network information) and ESI(EtherCAT slave information)
ecat-enablekit-dpdk:
This package provides a library to enhance IgH EtherCAT Master Stack(user space) to support ENI(EtherCAT network information) and ESI(EtherCAT slave information)
Quick Start
Kernel Space Stack
You can install this component from the Intel* Embodied Intelligence SDK repository.
$ sudo apt install ighethercat ighethercat-dkms ighethercat-examples ecat-enablekit
Set up EtherCAT Master
This section describes the procedure to run IgH EtherCAT Master Stack.
Dependencies
Native EtherCAT Device Driver - IGB/IGC (High performance)
Only supports IGB, IGC devices (Intel® Ethernet Controller I210, Intel® Ethernet Controller I211, Intel® Ethernet Controller I225/I226) and mGBE devices
One networking driver for EtherCAT and non-EtherCAT devices
Driver gets more complicated, as it must handle EtherCAT and non-EtherCAT devices.
Generic EtherCAT Device Driver - Generic (Low performance) - Any Ethernet hardware that is covered by a Linux* Ethernet driver can be used for EtherCAT - Performance is low compared to the native approach, because the frame data have to traverse the lower layers of the network stack
Note: If the target system does not support the IGB/IGC/mGBE device driver, select the generic EtherCAT device driver.
EtherCAT Initialization Script
The EtherCAT master init script is installed in /etc/init.d/ethercat.
EtherCAT Sysconfig File
The init script uses a mandatory sysconfig file installed in /etc/sysconfig/ethercat. The sysconfig file contains the configuration variables needed to operate one or more masters. The documentation is within the file and also included here.
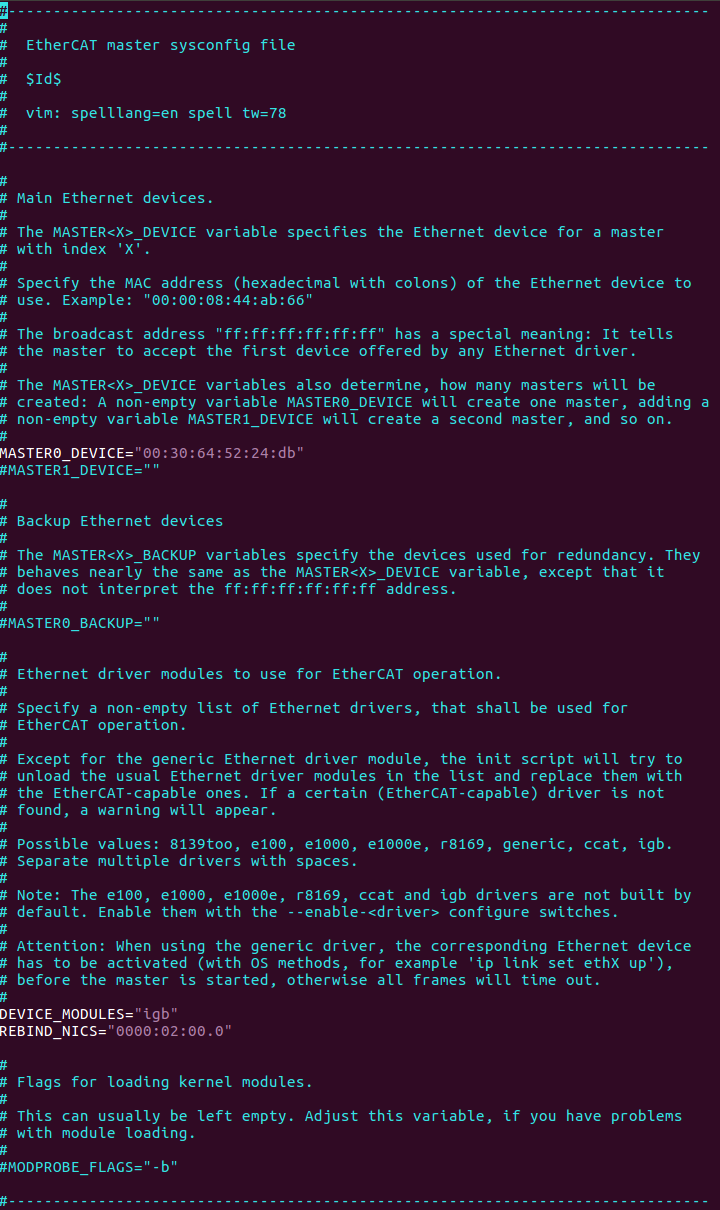
Do the following:
Set REBIND_NICS. Use
lspcito query net devices. One of the devices might be be specified as an EtherCAT network interface.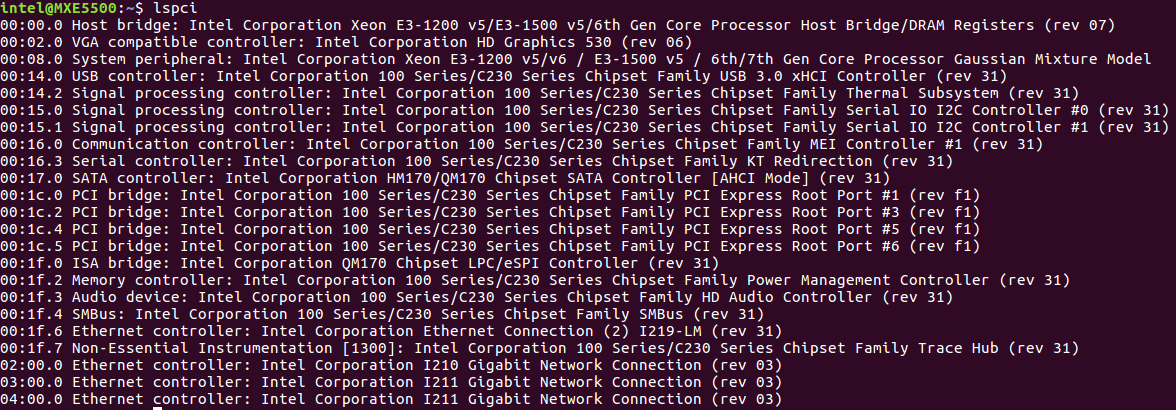
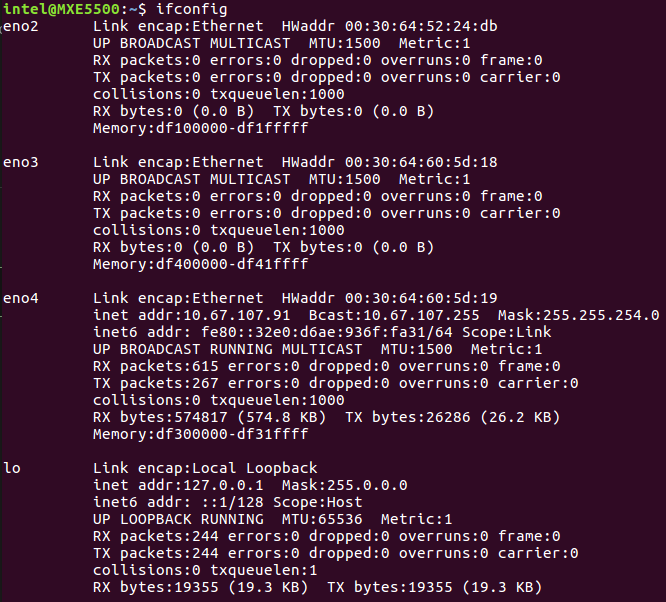
Fill the MAC address for MASTER0_DEVICE. Get the MAC address of the Network Interface Controllers (NICs) selected for EtherCAT.
Note: EtherCAT Master Stack supports dual master configuration. To configure a second master, fill the MAC address for MASTER1_DEVICE and add PCI address in REBIND_NICS.
Modify DEVICE_MODULES:
Option 1: Intel Corporation I210 GbE controller EtherCAT driver (High performance)
DEVICE_MODULES="igb"
Option 2: Intel Corporation I225 GbE controller EtherCAT driver (High performance)
DEVICE_MODULES="igc"
Option 3: Intel® Core™ 12th S-Series [Alder Lake] and 11th Gen P-Series and U-Series [Tiger Lake] Intel® Atom™ x6000 Series [Elkhart Lake] GbE controller EtherCAT driver (High performance)
DEVICE_MODULES="dwmac_intel"
Fallback: Generic driver as EtherCAT driver (Low performance)
DEVICE_MODULES="generic"
Start Master as Service
After the init script and the sysconfig file are ready to configure, and are placed in the right location, the EtherCAT master can be inserted as a service. You can use the init script to manually start and stop the EtherCAT master. Execute the init script with one of the following parameters:
Start EtherCAT Master
Stop EtherCAT Master
Restart EtherCAT Master
Status of EtherCAT Master
EtherCAT Configuration & Compilation
By default, Intel Embodied Intelligence SDK provides a generic configuration to enable EtherCAT. EtherCAT stack supports DKMS to build kernel modules whose sources generally reside outside the kernel source tree.
The source code of the EtherCAT stack can be found at: /var/lib/dkms/ighethercat-dkms/1.6/source
The default configuration of EtherCAT stack is located in a file named dkms.conf. The configuration can be modified as needed.
Compiling EtherCAT
Change directory to the EtherCAT source:
$ cd /var/lib/dkms/ighethercat-dkms/1.6/source
Modify the default configuration of EtherCAT stack located in
dkms.confas needed.Rebuild the EtherCAT stack with using the following commands:
$ dkms uninstall ighethercat-dkms -v 1.6 $ dkms unbuild ighethercat-dkms -v 1.6 $ dkms build ighethercat-dkms -v 1.6 $ dkms install ighethercat-dkms -v 1.6
Makefile Template for EtherCAT application
Provided below are some Makefile templates for EtherCAT application. These templates are provided to build EtherCAT application without Makefile.am.
Makefile template for PREEMPT-RT kernel
CC = gcc CFLAGS = -Wall -O3 -g -D_GNU_SOURCE -D_REENTRANT -fasynchronous-unwind-tables LIBS = -lm -lrt -lpthread -lethercat -Wl,--no-as-needed -L/usr/lib TARGET = test SRCS = $(wildcard *.c) OBJS = $(SRCS:.c=.o) $(TARGET):$(OBJS) $(CC) -o $@ $^ $(LIBS) clean: rm -rf $(TARGET) $(OBJS) %.o:%.c $(CC) $(CFLAGS) -o $@ -c $<
Makefile template for Dovetail kernel
CC = gcc CFLAGS = -Wall -O3 -g -I/usr/include/xenomai/cobalt -I/usr/include/xenomai -D_GNU_SOURCE -D_REENTRANT -fasynchronous-unwind-tables -D__COBALT__ -D__COBALT_WRAP__ LIBS = -lm -lrt -lpthread -lethercat_rtdm -Wl,--no-as-needed -Wl,@/usr/lib/cobalt.wrappers -Wl,@/usr/lib/modechk.wrappers /usr/lib/xenomai/bootstrap.o -Wl,--wrap=main -Wl,--dynamic-list=/usr/lib/dynlist.ld -L/usr/lib -lcobalt -lmodechk TARGET = test SRCS = $(wildcard *.c) OBJS = $(SRCS:.c=.o) $(TARGET):$(OBJS) $(CC) -o $@ $^ $(LIBS) clean: rm -rf $(TARGET) $(OBJS) %.o:%.c $(CC) $(CFLAGS) -o $@ -c $<
User Space Stack
You can install this component from the Intel* Embodied Intelligence SDK repository.
$ sudo apt install ighethercat-dpdk ighethercat-dpdk-examples ecat-enablekit-dpdk
Set up EtherCAT Master
This section describes the procedure to run EtherCAT Master User Space Stack.
EtherCAT Sysconfig File
The ecrt.conf file located at /etc/sysconfig/ is a crucial configuration file for setting up EtherCAT master nodes. This file contains the necessary configuration variables to operate one or more EtherCAT masters effectively. Make sure to customize below parameters based on your hardware setup and operational needs.
The following describes the configuration parameters that can be defined within the ethercat section:
node_id:
This parameter assigns a unique identifier to each EtherCAT master node. The
node_idis essential for distinguish between different nodes, especially in setups involving multiple masters or when managing several EtherCAT networks. Each node should have a distinct ID to ensure proper communication and control within the network.
master_mac:
This specifies the MAC address of the network interface card (NIC) that the EtherCAT master will use for communication. The MAC address is a unique identifier for network devices, ensuring that each master can be correctly identified on the network. If you are using multiple master within a single EtherCAT application, you can register multiple MAC addresses as a list. This allows for flexible configurations and supports complex network setups.
debug_level:
This setting controls the verbosity of debug information output by the EtherCAT master. A debug level of
0means no debug information will be printed, which is suitable for production environments where performance is prioritized. Higher debug levels(up to2) provide more detailed logs, which can be invaluable during development or troubleshooting to understand the system’s behavior and diagnose issues.
drv_argv:
This parameter allows you to add extra Environment Abstraction Layer(EAL) for the Data Plane Development Kit(DPDK) framework. DPDK is a set of libraries and drivers for fast packet processing, and EAL parameters help configure its operation. For detailed information on available EAL parameters and their usage, you can refer to the official DPDK documentation at EAL parameters. This flexibility enables you to optimize the performance and behavior of the EtherCAT master according to your specific requirements.
vfio binding
As EtherCAT Master User Space Stack requires DPDK support for efficient EtherCAT communication, leveraging the vfio-pci driver as a kernel module for DPDK-bound ports. This setup is crucial for achieving high-performance packet processing, which is essential in real-time applications like EtherCAT. If an IOMMU is unavailable, the vfio-pci can used in no-iommu mode.
To enable DPDK to manage network ports, a utility script called dpdk-driver-bind.sh is provided to facilitate the binding and unbinding vfio-pci process for specify EtherCAT ports.
Binding
vfio-pcion EtherCAT portsdpdk-driver-bind.sh start <EtherCAT port BDF address>
Unbinding
vfio-pcion EtherCAT portsdpdk-driver-bind.sh stop <EtherCAT port BDF address>