Appendix¶
Note
These lists are not comprehensive. They are provided for reference only.
ECI Supported Distributions¶
Distribution |
Distribution Version |
ECI Version |
|||||
|---|---|---|---|---|---|---|---|
v3.3 |
v3.2 |
v3.1 |
v3.0.2 |
v3.0.1 |
v3.0 |
||
< Debian > |
Debian 12 (Bookworm) . |
◆ |
◆ |
||||
Debian 11 (Bullseye) . |
‡ |
‡ |
◆ |
◆ |
◆ |
◆ |
|
< Canonical® Ubuntu® > |
Canonical® Ubuntu® 24.04 (Noble Numbat) . |
◆ |
|||||
Canonical® Ubuntu® 22.04 (Jammy Jellyfish) . |
‡ |
◆ |
◆ |
◆ |
◆ |
◆ |
|
< Red Hat® Enterprise Linux® > |
Red Hat® Enterprise Linux® 9.3 (Plow) . |
◆ |
◆ |
◆ |
|||
Key |
Symbol |
|---|---|
Supported |
◆ |
CVE & Bug fixes only |
‡ |
ECI Supported Distributions per Intel® platforms¶
Use the table below to determine which ECI supported OS distribution(s) you should use with your Intel® platform to achieve best results:
Distribution |
Distribution Version |
< Intel® platforms > |
||||||||
|---|---|---|---|---|---|---|---|---|---|---|
Series 3 Core™ Ultra for the Edge (WCL) Wildcat Lake |
Series 3 Core™ Ultra (PTL) Panther Lake |
Series 1/2 Core™ Ultra (MTL/ARL) Meteor / Arrow Lake |
7000 Series Intel Atom® (ASL) Amston Lake |
14th/13th Gen Core™ (RPL) Raptor Lake |
12th/11th/9th/8th Gen Core™ (ADL/TGL/CFL/WHL) Alder / Tiger / Coffee / Whiskey Lake |
Xeon® D-1700 (ICL-D) Ice Lake D |
6000E Series Intel Atom®™ (EHL) Elkhart Lake |
|||
< Debian > |
Debian 12 (Bookworm) . |
✔ |
✔ |
✔ |
✔ |
✔ |
✔ |
|||
Debian 11 (Bullseye) . |
✔ |
✔ |
✔ |
|||||||
< Canonical® Ubuntu® > |
Canonical® Ubuntu® 24.04 (Noble Numbat) . |
✔ ‡ |
✔ ‡ |
✔ |
✔ |
✔ |
✔ |
✔ |
✔ |
|
Canonical® Ubuntu® 22.04 (Jammy Jellyfish) . |
✔ |
✔ |
✔ |
✔ |
✔ |
|||||
< Red Hat® Enterprise Linux® > |
Red Hat® Enterprise Linux® 9.3 (Plow) . |
✔ |
✔ |
✔ |
✔ |
✔ |
||||
Key |
Symbol |
|---|---|
‡ |
ECI Linux Intel LTS Kernel¶
ECI distributes various builds of the Linux Intel LTS kernel, which provide long-term support (LTS) closely tied to the OS distribution. These kernels are detailed in the table below:
Distribution |
Linux kernel type |
Linux kernel version |
Deb Packages |
Source URL |
|---|---|---|---|---|
Debian 12 (Bookworm) |
Real-time PREEMPT_RT |
6.1.80-rt26 |
linux-headers-intel-rtlinux-image-intel-rtlinux-intel-rt |
|
Debian 12 (Bookworm) |
Xenomai/Dovetail |
6.1.80 |
linux-headers-intel-xenomailinux-image-intel-xenomailinux-intel-xenomai |
|
Debian 12 (Bookworm) |
ACRN Hypervisor compatible |
6.1.80 |
linux-headers-intel-acrn-soslinux-image-intel-acrn-soslinux-intel-acrn-sos |
|
Canonical® Ubuntu® 24.04 (Noble Numbat) |
Real-time PREEMPT_RT |
6.6.58-rt45 |
linux-headers-intel-rtlinux-image-intel-rtlinux-intel-rt |
|
Canonical® Ubuntu® 24.04 (Noble Numbat) |
Xenomai/Dovetail |
6.6.58 |
linux-headers-intel-xenomailinux-image-intel-xenomailinux-intel-xenomai |
|
Canonical® Ubuntu® 24.04 (Noble Numbat) |
ACRN Hypervisor compatible |
6.6.58 |
linux-headers-intel-acrn-soslinux-image-intel-acrn-soslinux-intel-acrn-sos |
ECI Linux Intel Experimental Kernel¶
ECI distributes various builds of the Linux Intel LTS kernel or Intel Mainline Tracking kernel, which provide latest silicon support ahead of the OS distribution. These kernels are detailed in the table below:
Distribution |
Linux kernel type |
Linux kernel version |
Deb Packages |
Source URL |
|---|---|---|---|---|
Debian 12 (Bookworm) |
Real-time PREEMPT_RT |
6.12.8 |
linux-headers-intel-rt-experimentallinux-image-intel-rt-experimentallinux-intel-rt-experimental |
|
Debian 12 (Bookworm) |
Xenomai/Dovetail |
6.12.8 |
linux-headers-intel-xenomai-experimentallinux-image-intel-xenomai-experimentallinux-intel-xenomai-experimental |
|
Canonical® Ubuntu® 24.04 (Noble Numbat) |
Real-time PREEMPT_RT |
6.17.11 |
linux-headers-intel-rt-experimentallinux-image-intel-rt-experimentallinux-intel-rt-experimental |
|
Canonical® Ubuntu® 24.04 (Noble Numbat) |
Xenomai/Dovetail |
6.12.8 |
linux-headers-intel-xenomai-experimentallinux-image-intel-xenomai-experimentallinux-intel-xenomai-experimental |
ECI Components¶
The following components can be installed using packages from ECI or open-source. Click the component hyperlink for instructions on installing and using the component.
Component |
Version |
Description |
|---|---|---|
3.3 |
Open-source ACRN Type 1 hypervisor
|
|
4.0 |
Open-source CAN Bus software
|
|
4.11.0.0 |
Commercially available IEC 61131-3-compliant SoftPLC for PC-based industrial controllers running on Linux with soft real-time properties.
|
|
6.0.0 |
Open-source software which provides a number of monitoring and control technologies to help software understand and control the usage of shared resources within the platform, such as last-level cache (LLC) and memory bandwidth
|
|
3.3 |
Intel-created software which can be used to bridge various industrial protocols together, effectively providing translation from one protocol to another.
|
|
1.6 |
Open-source EtherCAT Master software
|
|
4.2.1 |
Intel-created software which enables an administrator to perform critical Device Management operations over-the-air remotely from the cloud.
|
|
3.2.0 |
Edge Orchestration provides a set of extensions for popular orchestration software (Kubernetes, Kubespray, Tanzu, Rancher, Helm, and so on), which enable clusters to take advantage of Intel® features such as Intel® Resource Director Technology (Intel® RDT) and Intel® Time Coordinated Computing.
|
|
0.9.13 |
Intel-created performance synthetic testing to compare Linux Intel® Industrial Ethernet driver hw-offload capabilities.
|
|
0.3.0 |
The PLCopen motion standard provides a way to have standard application libraries that are reusable for multiple hardware platforms.
|
|
1.1 |
The Real Time Data Agent provides an unified and real-time way to write/read data to/from shared memory, and also a demo program to parse/pack/send data to container stack for storage and visualization.
|
|
1.12 |
RTPM is designed to check the key settings of the system and help you to identify the hotspot of the system for real-time performance and provide a recommendation based on the Best-known Configuration (BKC). In addition, RTPM provides a way to measure the system scheduling latency with some open source tools.
|
|
Humble |
Open-source software intended for writing robot software. ROS is comprised of a collection of tools, libraries, and conventions that aim to simplify the task of creating complex and robust robot behavior across a wide variety of robotic platforms.
|
|
1.1 |
Template files for launching a time-series data processing stack consisting of the MQTT broker mosquitto, telegraf as data colletion service, InfluxDB as time-series database and grafana for visualization.
|
ECI Benchmarks¶
The following benchmarks can be installed using packages from ECI or open-source. Click the benchmark hyperlink for instructions on installing and using the benchmark.
Benchmark |
Location after installation |
|---|---|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N/A |
|
|
ECI Examples¶
The following examples can be installed using packages from ECI or open-source. Click the reference documentation hyperlink for instructions on running the example.
Example |
Reference Documentation |
Location after installation |
|---|---|---|
CODESYS Application |
|
|
CODESYS Benchmark Application |
|
|
EC Protocol Bridge |
|
|
EC Protocol Bridge |
|
|
EtherCAT Enablekit |
|
|
Edge Control Protocol Bridge Example Applications |
|
|
Edge Control Protocol Bridge Example Configurations |
|
|
IgH EtherCAT Master Stack |
|
|
PLCopen Motion Control Examples |
|
|
How to monitor and control an 2-axis RRBot Robotic Arm |
N/A |
|
How to monitor and control an 6-axis HIWIN Robotic Arm |
N/A |
|
How to monitor and control an AGV (Automated Guided Vehicle) |
N/A |
|
How to plan robot grasp motion using 3-D Object Pose Detection (Automated Guided Vehicle) |
N/A |
ECI Kernel Configuration Optimizations¶
This list provides the additional kernel configurations used during compilation to optimize the system for real-time performance.
When Configuring x86_64 PPREEMPT_RT kernels, there is no default configuration file for each of the IPC models available, and the only kernel configuration file you may want to start from is shipped with ECI distributions. Below non exhaustive list of the most critical for a control Linux-RT OS runtime:
kernel config fragment overrides (.cfg) |
Comments |
|---|---|
CONFIG_HZ_250=y
CONFIG_NO_HZ=n
CONFIG_NO_HZ_FULL=y
CONFIG_NO_HZ_IDLE=n
CONFIG_ACPI_PROCESSOR=n
CONFIG_CPU_FREQ_GOV_ONDEMAND=n
CONFIG_CPU_FREQ_DEFAULT_GOV_ONDEMAND=n
CONFIG_CPU_FREQ_DEFAULT_GOV_PERFORMANCE=y
CONFIG_CPU_FREQ=n
CONFIG_CPU_IDLE=n
|
Reduce task scheduling-clock overhead and disable CPU governor Linux features |
ARCH_SUSPEND_POSSIBLE=n
CONFIG_SUSPEND=n
CONFIG_PM=n
|
Disable Linux power-management runtime features |
CONFIG_VIRT_CPU_ACCOUNTING=y
CONFIG_VIRT_CPU_ACCOUNTING_GEN=y
|
Enable more accurate task and CPU time accounting |
CONFIG_CPU_ISOLATION=y
CONFIG_RCU_NOCB_CPU=y
CONFIG_PREEMPT_RCU=y
CONFIG_HAVE_PREEMPT_LAZY=y
CONFIG_PREEMPT_LAZY=y
CONFIG_PREEMPT_RT=y
|
Enable more preemptive task scheduling policies and CPU temporal-isolation |
Note
When using x86_64 PPREEMPT_RT as ACRN single core Real-Time VM, CONFIG_SMP need to be disabled in kernel configuration.
Configuring x86_64 DOVETAIL/XENOMAI co-kernels is a bit different. There is no default configuration file for each of the IPC models available, and the only kernel configuration file you may want to start from is shipped with ECI distributions.
kernel config fragment overrides (.cfg) |
Comments |
|---|---|
CONFIG_HZ_250=y
CONFIG_NO_HZ=n
CONFIG_NO_HZ_FULL=y
CONFIG_NO_HZ_IDLE=n
CONFIG_ACPI_PROCESSOR=n
CONFIG_CPU_FREQ_GOV_ONDEMAND=n
CONFIG_CPU_FREQ_DEFAULT_GOV_ONDEMAND=n
CONFIG_CPU_FREQ_DEFAULT_GOV_PERFORMANCE=y
CONFIG_CPU_FREQ=n
CONFIG_CPU_IDLE=n
|
Reduce task scheduling-clock overhead and disable CPU governor Linux features |
ARCH_SUSPEND_POSSIBLE=n
CONFIG_SUSPEND=n
CONFIG_PM=n
|
Disable Linux power-management runtime features |
CONFIG_VIRT_CPU_ACCOUNTING=y
CONFIG_VIRT_CPU_ACCOUNTING_GEN=y
|
Enable more accurate task and CPU time accounting |
CONFIG_CPU_ISOLATION=y
CONFIG_RCU_NOCB_CPU=y
|
Enable CPU temporal-isolation |
CONFIG_XENOMAI=y
CONFIG_HAVE_DOVETAIL=y
CONFIG_DOVETAIL=y
CONFIG_XENO_ARCH_FPU=y
CONFIG_XENO_ARCH_SYS3264=y
CONFIG_XENO_OPT_SCHED_CLASSES=y
CONFIG_XENO_OPT_SCHED_WEAK=y
CONFIG_XENO_OPT_SCHED_TP=y
CONFIG_XENO_OPT_SCHED_TP_NRPART=4
CONFIG_XENO_OPT_SCHED_SPORADIC=y
CONFIG_XENO_OPT_SCHED_SPORADIC_MAXREPL=8
CONFIG_XENO_OPT_SCHED_QUOTA=y
CONFIG_XENO_OPT_SCHED_QUOTA_PERIOD=10000
CONFIG_XENO_OPT_SCHED_QUOTA_NR_GROUPS=32
CONFIG_XENO_OPT_STATS=y
CONFIG_XENO_OPT_SHIRQ=y
CONFIG_XENO_OPT_RR_QUANTUM=1000
CONFIG_XENO_OPT_AUTOTUNE=y
CONFIG_XENO_OPT_SCALABLE_SCHED=y
CONFIG_XENO_OPT_TIMER_RBTREE=y
CONFIG_XENO_OPT_PIPE=y
CONFIG_XENO_OPT_MAP=y
CONFIG_XENO_OPT_VFILE=y
CONFIG_XENO_OPT_PIPE_NRDEV=32
CONFIG_XENO_OPT_REGISTRY_NRSLOTS=512
CONFIG_XENO_OPT_SYS_HEAPSZ=4096
CONFIG_XENO_OPT_PRIVATE_HEAPSZ=256
CONFIG_XENO_OPT_SHARED_HEAPSZ=256
CONFIG_XENO_OPT_NRTIMERS=256
CONFIG_XENO_OPT_DEBUG_TRACE_LOGSZ=16
CONFIG_XENO_OPT_TIMING_SCHEDLAT=0
CONFIG_XENO_OPT_TIMING_KSCHEDLAT=0
CONFIG_XENO_OPT_TIMING_IRQLAT=0
CONFIG_XENO_OPT_DEBUG=y
CONFIG_XENO_OPT_DEBUG_COBALT=y
CONFIG_XENO_OPT_DEBUG_MEMORY=y
CONFIG_XENO_OPT_DEBUG_CONTEXT=y
CONFIG_XENO_OPT_DEBUG_LOCKING=y
CONFIG_XENO_OPT_DEBUG_USER=y
CONFIG_XENO_OPT_DEBUG_MUTEX_RELAXED=y
CONFIG_XENO_OPT_DEBUG_MUTEX_SLEEP=y
CONFIG_XENO_OPT_DEBUG_LEGACY=y
CONFIG_XENO_OPT_DEBUG_TRACE_RELAX=y
CONFIG_XENO_OPT_WATCHDOG=y
CONFIG_XENO_OPT_WATCHDOG_TIMEOUT=4
CONFIG_XENO_OPT_RTDM_COMPAT_DEVNODE=y
CONFIG_XENO_DRIVERS_AUTOTUNE=y
CONFIG_XENO_DRIVERS_16550A=y
CONFIG_XENO_DRIVERS_16550A_PIO=y
CONFIG_XENO_DRIVERS_TIMERBENCH=y
CONFIG_XENO_DRIVERS_SWITCHTEST=y
CONFIG_XENO_DRIVERS_HEAPCHECK=y
CONFIG_XENO_DRIVERS_RTDMTEST=m
CONFIG_XENO_DRIVERS_CAN=y
CONFIG_XENO_DRIVERS_CAN_DEBUG=y
CONFIG_XENO_DRIVERS_CAN_LOOPBACK=y
CONFIG_XENO_DRIVERS_CAN_RXBUF_SIZE=1024
CONFIG_XENO_DRIVERS_CAN_MAX_DEVICES=4
CONFIG_XENO_DRIVERS_CAN_MAX_RECEIVERS=16
CONFIG_XENO_DRIVERS_CAN_BUS_ERR=y
CONFIG_XENO_DRIVERS_CAN_VIRT=y
CONFIG_XENO_DRIVERS_CAN_PEAK_CANFD=y
CONFIG_XENO_DRIVERS_CAN_SJA1000=y
CONFIG_XENO_DRIVERS_NET=m
CONFIG_XENO_DRIVERS_RTNET_CHECKED=y
CONFIG_XENO_DRIVERS_NET_RX_FIFO_SIZE=32
CONFIG_XENO_DRIVERS_NET_ETH_P_ALL=y
CONFIG_XENO_DRIVERS_NET_RTWLAN=y
CONFIG_XENO_DRIVERS_NET_RTIPV4=m
CONFIG_XENO_DRIVERS_NET_RTIPV4_ICMP=y
CONFIG_XENO_DRIVERS_NET_RTIPV4_NETROUTING=y
CONFIG_XENO_DRIVERS_NET_RTIPV4_NET_ROUTES=16
CONFIG_XENO_DRIVERS_NET_RTIPV4_ROUTER=y
CONFIG_XENO_DRIVERS_NET_RTIPV4_DEBUG=y
CONFIG_XENO_DRIVERS_NET_RTIPV4_UDP=m
CONFIG_XENO_DRIVERS_NET_RTIPV4_TCP=m
CONFIG_XENO_DRIVERS_NET_RTPACKET=m
CONFIG_XENO_DRIVERS_NET_RTMAC=m
CONFIG_XENO_DRIVERS_NET_TDMA=m
CONFIG_XENO_DRIVERS_NET_TDMA_MASTER=y
CONFIG_XENO_DRIVERS_NET_RTCFG=m
CONFIG_XENO_DRIVERS_NET_RTCFG_DEBUG=y
CONFIG_XENO_DRIVERS_NET_DRV_PCNET32=m
CONFIG_XENO_DRIVERS_NET_DRV_TULIP=m
CONFIG_XENO_DRIVERS_NET_DRV_EEPRO100=m
CONFIG_XENO_DRIVERS_NET_DRV_EEPRO100_DBG=y
CONFIG_XENO_DRIVERS_NET_DRV_E1000=m
CONFIG_XENO_DRIVERS_NET_DRV_E1000E=m
CONFIG_XENO_DRIVERS_NET_DRV_NATSEMI=m
CONFIG_XENO_DRIVERS_NET_DRV_8139=m
CONFIG_XENO_DRIVERS_NET_DRV_VIA_RHINE=m
CONFIG_XENO_DRIVERS_NET_DRV_IGB=m
CONFIG_XENO_DRIVERS_NET_DRV_R8169=m
CONFIG_XENO_DRIVERS_NET_DRV_LOOPBACK=m
CONFIG_XENO_DRIVERS_NET_DRV_SMC91111=m
CONFIG_XENO_DRIVERS_NET_EXP_DRIVERS=y
CONFIG_XENO_DRIVERS_NET_DRV_3C59X=m
CONFIG_XENO_DRIVERS_NET_DRV_E1000_NEW=m
CONFIG_XENO_DRIVERS_NET_DRV_RT2500=m
CONFIG_XENO_DRIVERS_NET_ADDON_RTCAP=m
CONFIG_XENO_DRIVERS_NET_ADDON_PROXY=m
CONFIG_XENO_DRIVERS_NET_ADDON_PROXY_ARP=y
CONFIG_XENO_DRIVERS_ANALOGY=y
CONFIG_XENO_DRIVERS_ANALOGY_DEBUG=y
CONFIG_XENO_DRIVERS_ANALOGY_DEBUG_LEVEL=0
CONFIG_XENO_DRIVERS_ANALOGY_FAKE=y
CONFIG_XENO_DRIVERS_ANALOGY_8255=y
CONFIG_XENO_DRIVERS_ANALOGY_PARPORT=y
CONFIG_XENO_DRIVERS_ANALOGY_NI_MITE=y
CONFIG_XENO_DRIVERS_ANALOGY_NI_TIO=y
CONFIG_XENO_DRIVERS_ANALOGY_NI_MIO=y
CONFIG_XENO_DRIVERS_ANALOGY_NI_PCIMIO=y
CONFIG_XENO_DRIVERS_ANALOGY_S526=y
CONFIG_XENO_DRIVERS_RTIPC=y
CONFIG_XENO_DRIVERS_RTIPC_XDDP=y
CONFIG_XENO_DRIVERS_RTIPC_IDDP=y
CONFIG_XENO_OPT_IDDP_NRPORT=32
CONFIG_XENO_DRIVERS_RTIPC_BUFP=y
CONFIG_XENO_OPT_BUFP_NRPORT=32
CONFIG_XENO_DRIVERS_UDD=y
CONFIG_XENO_DRIVERS_GPIO=y
CONFIG_XENO_DRIVERS_GPIO_DEBUG=y
CONFIG_XENO_DRIVERS_GPIOPWM=y
CONFIG_XENO_VERSION_MAJOR=3
CONFIG_XENO_VERSION_MINOR=1
CONFIG_XENO_REVISION_LEVEL=0
CONFIG_XENO_VERSION_STRING="3.1"
|
Enable more Xenomai task scheduling policies and CPU temporal-isolation |
ECI Kernel Boot Optimizations¶
This list provides the additional boot parameters used to optimize the system for real-time performance.
When Configuring x86_64 PPREEMPT_RT kernels, there is no default configuration file for each of the IPC models available, and the only kernel configuration file you may want to start from is shipped with ECI distributions. Below non exhaustive list of the most critical for a control Linux-RT OS runtime:
kernel command-line append |
Comments |
|---|---|
hpet=disable \
clocksource=tsc \
tsc=reliable \
|
|
intel_pstate=disable \
intel_idle.max_cstate=0 \
intel.max_cstate=0 \
processor.max_cstate=0 \
processor_idle.max_cstate=0 \
|
Use |
rcupdate.rcu_cpu_stall_suppress=1 \
mce=off \
nmi_watchdog=0 \
nosoftlockup \
|
Suppress RCU CPU stall warning messages,
disable machine check exceptions,
disable NMI lockup detector, and
disable logging of back-traces when a
process executes on a CPU for longer
than the |
noht \
|
Disable Hyper-Threading |
numa_balancing=disable \
|
Prevent cache from being moved based on task processor affinity. |
hugepages=1024 \
|
Pre-allocate 1024 * 2MB memory chunks (2GB) to provide ample memory for initial applications. |
rcu_nocb_poll \
|
Relieve each CPU from the responsibility of awakening their RCU offload threads. |
audit=0 \
irqaffinity=0 \
isolcpus=1,3 \
rcu_nocbs=1,3 \
nohz-full=1,3 \
|
Assign task CPU affinity to CPU 0 and prevent tasks from being assigned to CPUs 1 & 3 (Note: Isolated cores are chosen dynamically depending on which CPUs are available when the GRUB config is generated) This effectively makes these CPUs favorable for real-time tasks, since they should experience minimal contention. |
i915.enable_rc6=0 \
i915.enable_dc=0 \
i915.disable_power_well=0 \
xe.max_vfs=7 \
xe.enable_dc=0 \
xe.disable_power_well=0 \
xd.enable_psr=0 \
xe.enable_sagv=0 \
xe.nuclear_pageflip=1 \
|
Prevent integrated graphics from changing power states. |
Configuring x86_64 DOVETAIL/XENOMAI co-kernels is a bit different. There is no default configuration file for each of the IPC models available, and the only kernel configuration file you may want to start from is shipped with ECI distributions. In addition to the x86_64 PPREEMPT_RT kernel boot optimizations, x86_64 DOVETAIL/XENOMAI appends the following:
kernel command-line append |
Comments |
|---|---|
xenomai.supported_cpus=0x0d \
xenomai.allowed_group=1234 \
xenomai.sysheap_size=256 \
xenomai.state=enabled \
xenomai.smi=detect \
xenomai.smi_mask=1 \
|
Xenomai supported CPUs is different from
normal Linux cmdline
(ex: |
nosmap \
nosmt \
nohalt \
cpufreq.off=1 \
idle=poll \
|
Additional Boot Parameters for Intel® TCC Tools¶
The following list of boot parameters are used to enable TCC capability.
Kernel Command line append |
Comments |
rdt=!l2cat,l3cat \
art=virtallow \
|
Disable cat, required for TCC |
Additional Boot Parameters for ACRN Real-Time VM¶
The following list of boot parameters are used for ACRN Real-Time VM. These parameters are mostly applicable to the Linux-based RTOS, such as PREEMPT_RT Linux and Xenomai.
Kernel Command line append |
Comments |
nohpet \
no_timer_check \
ignore_loglevel \
log_buf_len=16M \
consoleblank=0 \
console=hvc0 \
i915.nuclear_pageflip=1 \
i915.avail_planes_per_pipe=0x070F00 \
x2apic_phys \
mce=ignore_ce \
idle=poll \
|
|
isolcpus=nohz,domain,<list> \
rcu_nocbs=<list> \
nohz_full=<list> \
|
Modify parameters. List RT VM cores allocated to real-time applications. If the RTVM is single core, these parameters should be removed. |
Note
If the ACRN Real-Time VM is single core, parameter nohz=off should be added in kernel command line.
Recommended ECI BIOS Optimizations¶
Note
Use an approved Intel® BIOS checker tool before configuring for production use cases.
Setting Name |
Option |
Setting Menu |
|---|---|---|
Hyper-Threading |
Disabled |
Intel Advanced Menu ⟶ CPU Configuration |
Intel Virtualization Technology (VT-x) |
Disabled* (see footnote) |
Intel Advanced Menu ⟶ CPU Configuration |
Intel(R) SpeedStep |
Disabled |
Intel Advanced Menu ⟶ Power & Performance ⟶ CPU - Power Management Control |
Turbo Mode |
Disabled |
Intel Advanced Menu ⟶ Power & Performance ⟶ CPU - Power Management Control |
C States |
Disabled |
Intel Advanced Menu ⟶ Power & Performance ⟶ CPU - Power Management Control |
HWP Autonomous EPP Grouping |
Disabled |
Intel Advanced Menu ⟶ Power & Performance ⟶ CPU - Power Management Control |
RC6 (Render Standby) |
Disabled |
Intel Advanced Menu ⟶ Power & Performance ⟶ GT - Power Management Control |
MC6 (Media Standby) |
Disable |
Intel Advanced Menu ⟶ Power & Performance ⟶ GT - Power Management Control |
Maximum GT freq |
Lowest (usually 100MHz) |
Intel Advanced Menu ⟶ Power & Performance ⟶ GT - Power Management Control |
SA GV |
Fixed High |
Intel Advanced Menu ⟶ Memory Configuration |
VT-d |
Enabled* (see footnote) |
Intel Advanced Menu ⟶ System Agent (SA) Configuration |
PCI Express Clock Gating |
Disabled |
Intel Advanced Menu ⟶ System Agent (SA) Configuration ⟶ PCI Express Configuration |
Gfx Low Power Mode |
Disabled |
Intel Advanced Menu ⟶ System Agent (SA) Configuration ⟶ Graphics Configuration |
ACPI S3 Support |
Disabled |
Intel Advanced Menu ⟶ ACPI Settings |
Low Power S0 Idle Capability |
Disabled |
Intel Advanced Menu ⟶ ACPI Settings |
Native ASPM |
Disabled |
Intel Advanced Menu ⟶ ACPI Settings |
Legacy IO Low Latency |
Enabled |
Intel Advanced Menu ⟶ PCH-IO Configuration |
PCH Cross Throttling |
Disabled |
Intel Advanced Menu ⟶ PCH-IO Configuration |
Delay Enable DMI ASPM |
Disabled |
Intel Advanced Menu ⟶ PCH-IO Configuration ⟶ PCI Express Configuration |
DMI Link ASPM |
Disabled |
Intel Advanced Menu ⟶ PCH-IO Configuration ⟶ PCI Express Configuration |
Aggressive LPM Support |
Disabled |
Intel Advanced Menu ⟶ PCH-IO Configuration ⟶ SATA And RST Configuration |
USB Periodic SMI |
Disabled |
Intel Advanced Menu ⟶ LEGACY USB Configuration |
VT-xandVT-dare required by most virtualization solutions (KVM, RTH Hypervisor, ACRN Hypervisor, etc.), so set toenabledfor greatest compatibility. However, if you know that virtualization will not be used, you can safely setVT-xandVT-dto disabled.
Setting Name |
Option |
Setting Menu |
|---|---|---|
Logical Processor |
Disabled |
Processor Settings |
Uncore Frequency RAPL |
Disabled |
Processor Settings |
Local Machine Check Exception |
Disabled |
Processor Settings |
System Profile |
Custom |
System Profile Settings |
Optimized Power Mode |
Disabled |
System Profile Settings |
Turbo Boost |
Disabled |
System Profile Settings |
C1E |
Disabled |
System Profile Settings |
C-States |
Disabled |
System Profile Settings |
Uncore Frequency |
Maximum |
System Profile Settings |
Dynamic Load Line Switch |
Disabled |
System Profile Settings |
Energy Efficient Policy |
Performance |
System Profile Settings |
CPU Interconnect Bus Link Power Management |
Disabled |
System Profile Settings |
PCI ASPM L1 Link Power Management |
Disabled |
System Profile Settings |
Workload Configuration |
IO Sensitive |
System Profile Settings |
Setting Name |
Option |
Setting Menu |
|---|---|---|
Active Efficient-cores |
All |
Intel Advanced Menu ⟶ CPU Configuration |
Active LP Efficient-cores |
0 |
Intel Advanced Menu ⟶ CPU Configuration |
X2APIC |
Enabled |
Intel Advanced Menu ⟶ CPU Configuration |
C-states |
Enabled |
Intel Advanced Menu ⟶ Power & Performance ⟶ CPU - Power Management Control |
Intel(R) Speed Shift |
Enabled |
Intel Advanced Menu ⟶ Power & Performance ⟶ CPU - Power Management Control |
Intel(R) SpeedStep |
Enabled |
Intel Advanced Menu ⟶ Power & Performance ⟶ CPU - Power Management Control |
HWP Autonomous EPP Grouping |
Disabled |
Intel Advanced Menu ⟶ Power & Performance ⟶ CPU - Power Management Control |
RC6 (Render Standby) |
Disabled |
Intel Advanced Menu ⟶ Power & Performance ⟶ GT - Power Management Control |
MC6 (Media Standby) |
Enabled |
Intel Advanced Menu ⟶ Power & Performance ⟶ GT - Power Management Control |
Disable Turbo GT frequency |
Disabled |
Intel Advanced Menu ⟶ Power & Performance ⟶ GT - Power Management Control |
Maximum GT frequency |
Default Max Frequency |
Intel Advanced Menu ⟶ Power & Performance ⟶ GT - Power Management Control |
Resource Priority Feature |
Disabled |
Intel Advanced Menu ⟶ Power & Performance ⟶ GT - Power Management Control |
ACPI D3Cold support |
Enabled |
Intel Advanced Menu ⟶ ACPI Settings |
Low Power S0 Idle Capability |
Disabled |
Intel Advanced Menu ⟶ ACPI Settings |
Page Close Idle Timeout |
Disabled |
Intel Advanced Menu ⟶ Memory Configuration |
Power Down Mode |
Disabled |
Intel Advanced Menu ⟶ Memory Configuration |
Legacy IO Low Latency |
Enabled |
Intel Advanced Menu ⟶ PCH-IO Configuration |
SA GV |
Disabled |
Intel Advanced Menu ⟶ PCH-IO Configuration |
ASPM |
Disabled |
Intel Advanced Menu ⟶ System Agent (SA) Configuration ⟶ PCI Express Configuration |
L1 Substates |
Enabled |
Intel Advanced Menu ⟶ System Agent (SA) Configuration ⟶ PCI Express Configuration |
PTM |
Enabled |
Intel Advanced Menu ⟶ System Agent (SA) Configuration ⟶ PCI Express Configuration |
TC-VC Mapping |
Enabled |
Intel Advanced Menu ⟶ System Agent (SA) Configuration ⟶ PCI Express Configuration |
Required BIOS configuration for Intel® TCC Tools¶
The following list provides additional BIOS settings for Intel® Time Coordinated Computing.
Note
Use an approved Intel® BIOS checker tool before configuring for production use cases.
Intel Advanced Menu |
Intel(R) Time Coordinated Computing |
|---|---|
Intel(R) TCC Mode |
Enabled |
Intel(R) TCC Authentication |
Disabled |
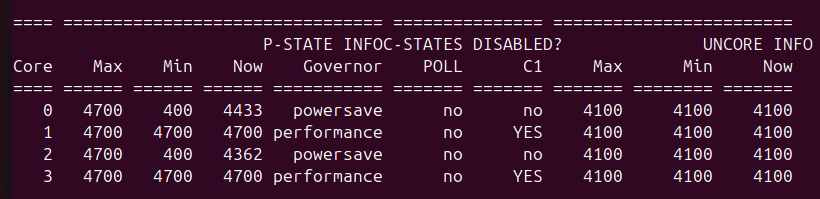
Additional OS optimizations¶
If BIOS has enabled C-states, it is recommended to use CommsPower script to optimize platform using intel-pstate driver. Configure isolated cores in following way:
Set minimum and maximum frequency to maximal available value.
Set Governor to performance.
Disable C-states other than C0 or Poll.
Set minimum and maximum Uncore frequency to maximal available value.
By following those steps, configuration will look like this: