Industrial Motion-Control ROS2 Gateway¶
The Industrial Motion-Control ROS2 Gateway is the communication bridge between DDS/RSTP wire-protocol ROS2 implementation and Motion Control (MC) IEC-61131-3 standard Intel implementation. It subscribes velocity commands (commonly from Navigation2 stack) and joint trajectories (commonly from MoveIt2 stack), communicates RT Domain through Shared Ring Buffer, and gathers the robot’s status (AMR’s odometry or industrial arm’s joint state) and publishes to ROS domain.
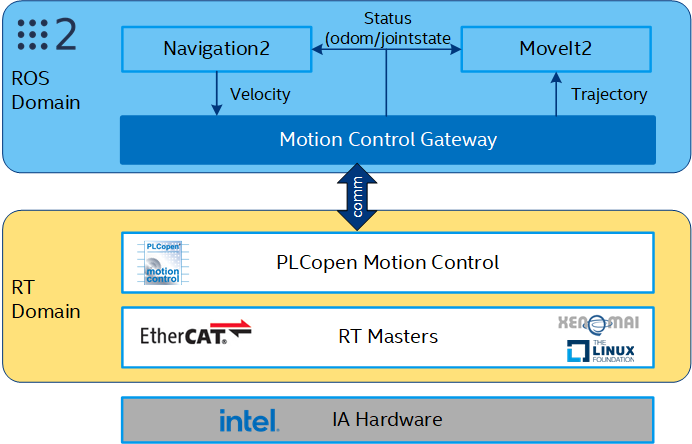
For more information, refer to PLCopen Motion Control.
Launch RRBot 2-axis Robotic Arm ROS2 tutorial¶
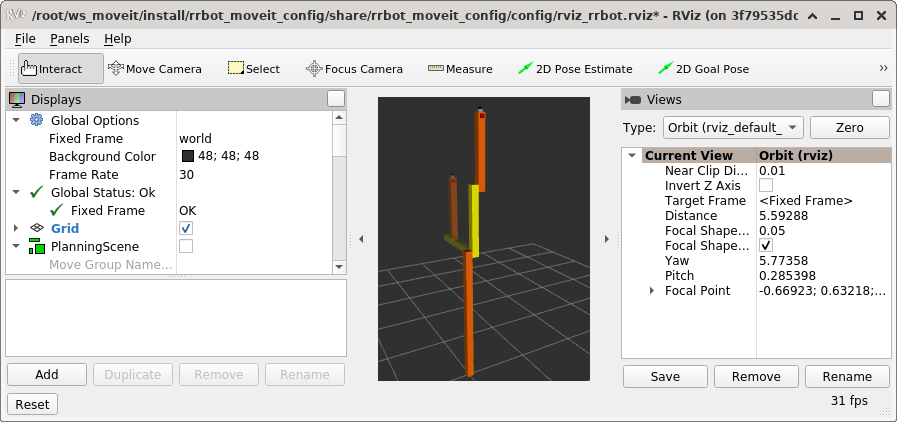
This tutorial monitors and controls the RRBot (Revolute-Revolute Manipulator Robot), a double inverted pendulum robots-arm, within the ROS2 framework. It demonstrates motion-control concepts using a simple 3-linkage, 2-joint arm.
Note
This demo uses the Shared Memory Ring Buffer Library libshmringbuf from the Real-time Data Agent, and requires root permissions to setup the shared memory. As such, sudo -i will be used to get elevated permissions.
Install ROS2 Desktop components, if not already completed.
Install PLCopen Motion Control
$ sudo apt install pciutils plcopen-databus libshmringbuf-dev libshmringbuf rt-data-agent ros-humble-controller-manager ros-humble-rrbot-bringup ros-humble-rrbot-moveit-demo
Open a terminal and run the PLCopen IEC-61131-3 motion-control driver:
$ sudo taskset -c 1,3 /opt/plcopen/plc_rt_rrbot
Note: By default, ECI isolates CPU cores 1 and 3 (see ECI Kernel Boot Optimizations), which is why cores
1,3are selected.Note: Replace
/opt/plcopen/plc_rt_rrbotwith/opt/plcopen/plc_rt_rrbot_igh -n <path_to_ethercat_eni_file>to run this demo using two IEC-61158 EtherCAT servo-controlled jointOpen a second terminal with elevated permissions:
$ sudo -i
In the second terminal, setup the ROS2 environment and run the RRBot ROS2 demo:
$ source /opt/ros/humble/setup.bash $ export ROS_DOMAIN_ID=31 $ ros2 launch rrbot_bringup rrbot_moveit_demo.launch.py
Expected Result:
MoveIt2 starts correctly without exiting.
Note: The command is correctly executed if no “Error” messages are printed (some warnings might be printed due to missing data). The following is a sample result:
[INFO] [launch]: All log files can be found below /root/.ros/log/2022-03-09-18-35-23-491029-2c3d06ed879c-62 [INFO] [launch]: Default logging verbosity is set to INFO [INFO] [robot_state_publisher-1]: process started with pid [64] [INFO] [rviz2-2]: process started with pid [66] [INFO] [run_moveit_cpp-3]: process started with pid [68] [INFO] [ros2_control_node-4]: process started with pid [79] [INFO] [ros2 run controller_manager spawner.py joint_trajectory_controller-5]: process started with pid [82] [INFO] [ros2 run controller_manager spawner.py joint_state_broadcaster-6]: process started with pid [85] [robot_state_publisher-1] Parsing robot urdf xml string. [robot_state_publisher-1] Link base_link had 1 children [robot_state_publisher-1] Link link1 had 1 children [robot_state_publisher-1] Link link2 had 3 children [robot_state_publisher-1] Link camera_link had 1 children [robot_state_publisher-1] Link camera_link_optical had 0 children [robot_state_publisher-1] Link hokuyo_link had 0 children [robot_state_publisher-1] Link tool_link had 0 children …… [run_moveit_cpp-3] [INFO] [1646850933.957900579] [moveit_cpp_demo]: arm.execute() [run_moveit_cpp-3] [INFO] [1646850933.958014839] [moveit_ros.trajectory_execution_manager]: Validating trajectory with allowed_start_tolerance 0.01 [run_moveit_cpp-3] [INFO] [1646850933.961465153] [moveit_ros.trajectory_execution_manager]: Starting trajectory execution ... [run_moveit_cpp-3] [INFO] [1646850933.961516544] [moveit.simple_controller_manager.follow_joint_trajectory_controller_handle]: sending trajectory to joint_trajectory_controller [ros2_control_node-4] [INFO] [1646850933.961809177] [joint_trajectory_controller]: Received new action goal [ros2_control_node-4] [INFO] [1646850933.961854996] [joint_trajectory_controller]: Accepted new action goal [run_moveit_cpp-3] [INFO] [1646850933.972377391] [moveit.simple_controller_manager.follow_joint_trajectory_controller_handle]: joint_trajectory_controller started execution [run_moveit_cpp-3] [INFO] [1646850933.972410502] [moveit.simple_controller_manager.follow_joint_trajectory_controller_handle]: Goal request accepted! [ros2_control_node-4] [INFO] [1646850936.278047163] [joint_trajectory_controller]: Goal reached, success! [run_moveit_cpp-3] [INFO] [1646850936.279264357] [moveit.simple_controller_manager.follow_joint_trajectory_controller_handle]: Controller joint_trajectory_controller successfully finished [run_moveit_cpp-3] [INFO] [1646850936.308323717] [moveit_ros.trajectory_execution_manager]: Completed trajectory execution with status SUCCEEDED ...
Launch HIWIN 6-axis Robotic Arm ROS2 tutorial¶
This demo allows you to monitor and control the following HIWIN industrial robots within the ROS2 framework:
XEG16 electric gripperXEG32 electric gripperXEG64 electric gripper
Note
The HIWIN robot controller’s HRSS software must be be updated to at least version 3.2.16
This demo uses the Shared Memory Ring Buffer Library libshmringbuf from the Real-time Data Agent, and requires root permissions to setup the shared memory. As such, sudo -i will be used to get elevated permissions.
Install ROS2 Desktop components, if not already completed.
Install PLCopen Motion Control, ROS2 HIWIN databus messages with IEC-61131-3 motion motion-control demo, and ROS2 HIWIN Moveit launcher:
$ sudo apt install pciutils plcopen-databus libshmringbuf-dev libshmringbuf $ sudo apt install ros-humble-run-hiwin-plc $ sudo apt install ros-humble-run-hiwin-moveit
Open a terminal and run the Robot-ARM PLCopen IEC-61131-3 motion-control driver:
$ sudo taskset -c 1,3 /opt/plcopen/plc_rt_robot_arm_rtmotion
Note: By default, ECI isolates CPU cores 1 and 3 (see ECI Kernel Boot Optimizations), which is why cores
1,3are selected.Open a second terminal with elevated permissions:
$ sudo -i
In the second terminal, setup the ROS2 environment and run the ROS2 HIWIN databus messages with IEC-61131-3 motion motion-control demo:
$ source /opt/ros/humble/setup.bash $ export ROS_DOMAIN_ID=31 $ ros2 run run_hiwin_plc run_hiwin_plc
Open a third terminal with elevated permissions:
$ sudo -i
In the third terminal, setup the ROS2 environment and run the ROS2 HIWIN Moveit launch file:
$ source /opt/ros/humble/setup.bash $ export ROS_DOMAIN_ID=31 $ ros2 launch run_hiwin_plc run_hiwin_plc.launch.py
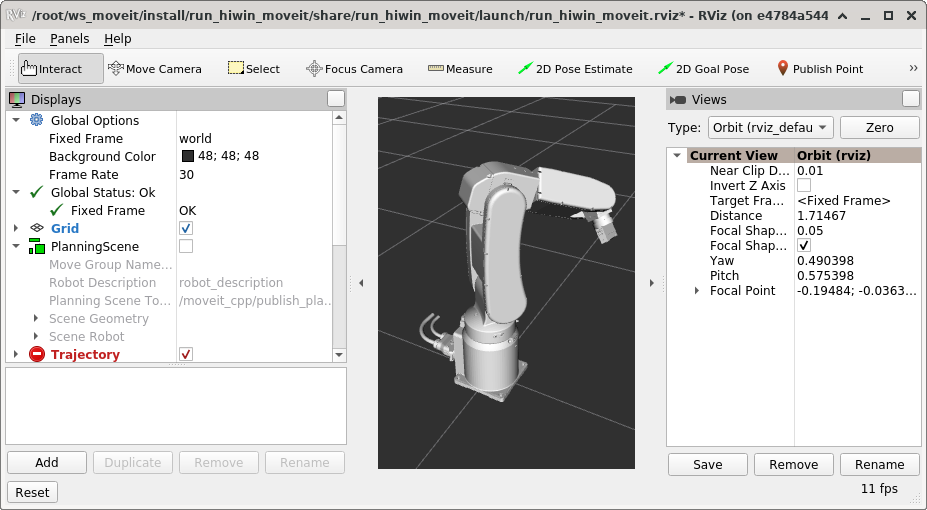
The demo begins by computing a simple motion plan which is visualized via a transparent RobotState display. This step alone involves a large number of components, such as IK, collision checking, planning scene, robot model, OMPL planning plugin and planner adapters. Immediately after, the trajectory is executed on the HIWIN ros2_control hardware interface.
Expected Result:
MoveIt2 and other ROS2 nodes start correctly without errors if RViz GUI is active and shows a robot arm moving periodically.
Tip
If no messages are displayed on the third terminal, verify that the environment variable
ROS_DOMAIN_IDhas been properly set to the same value in both terminal environments.Note: The command is correctly executed if no “Error” messages are printed (some warnings might be printed due to missing data). The following is a sample result:
[INFO] [launch]: All log files can be found below /home/root/.ros/log/2020-12-01-06-23-24-352240-ecs-intel-4273-3533 [INFO] [launch]: Default logging verbosity is set to INFO /usr/share/hiwin_robot_moveit_config/xacros/hiwin_robot_and_gripper.urdf /usr/share/hiwin_robot_moveit_config/srdf/hiwin_robot.srdf /usr/share/hiwin_robot_moveit_config/config/kinematics.yaml /usr/share/run_hiwin_plc/launch/run_hiwin_plc.launch.py:25: YAMLLoadWarning: calling yaml.load() without Loader=... is deprecated, as the default Loader is unsafe. Please read https://msg.pyyaml.org/load for full details. return yaml.load(file) /usr/share/run_hiwin_moveit/config/controllers.yaml /usr/share/hiwin_robot_moveit_config/config/ompl_planning.yaml [INFO] [robot_state_publisher-1]: process started with pid [3535] [INFO] [static_transform_publisher-2]: process started with pid [3537] [INFO] [run_hiwin_moveit-3]: process started with pid [3539] …… [run_hiwin_moveit-3] [INFO] [1606803829.707921557] [moveit_cpp_demo]: Trajectory status: 1 [run_hiwin_moveit-3] [INFO] [1606803831.708016640] [moveit_cpp_demo]: Set goal 2 [run_hiwin_moveit-3] [INFO] [1606803831.708051094] [moveit_cpp_demo]: Plan to goal [run_hiwin_moveit-3] [INFO] [1606803831.708563914] [moveit.ompl_planning.model_based_planning_context]: Planner configuration 'manipulator' will use planner 'geometric::RRTConnect'. Additional configuration parameters will be set when the planner is constructed. [run_hiwin_moveit-3] [INFO] [1606803831.723452924] [ompl]: /usr/src/debug/ompl/1.5.0-1-r0/git/src/ompl/geometric/planners/rrt/src/RRTConnect.cpp:354 - manipulator/manipulator: Created 5 states (2 start + 3 goal) [run_hiwin_moveit-3] [INFO] [1606803831.723565262] [ompl]: /usr/src/debug/ompl/1.5.0-1-r0/git/src/ompl/tools/multiplan/src/ParallelPlan.cpp:135 - ParallelPlan::solve(): Solution found by one or more threads in 0.000756 seconds [run_hiwin_moveit-3] [INFO] [1606803831.726168559] [ompl]: /usr/src/debug/ompl/1.5.0-1-r0/git/src/ompl/geometric/src/SimpleSetup.cpp:179 - SimpleSetup: Path simplification took 0.002559 seconds and changed from 3 to 2 states [run_hiwin_moveit-3] [INFO] [1606803831.728662079] [moveit_cpp_demo]: Sending the trajectory for execution
Launch AGV ROS2 tutorial¶
This tutorial allows monitors and controls an AGV (Automated Guided Vehicle) using the EtherCAT wired-protocol control on four Mecanum wheel-drive chassis within the ROS2 framework. ydlidar_ros2_driver is used for ydlidar devices to configure LiDAR in the ROS2 environment.
Note
This demo uses the Shared Memory Ring Buffer Library libshmringbuf from the Real-time Data Agent, and requires root permissions to setup the shared memory. As such, sudo -i will be used to get elevated permissions.
Install ROS2 Desktop components, if not already completed.
Install PLCopen Motion Control and the ROS2 AGVM databus messages with IEC-61131-3 motion motion-control demo:
$ sudo apt install pciutils plcopen-databus libshmringbuf-dev libshmringbuf $ sudo apt install ros-humble-agvm
Run the Robot-ARM PLCopen IEC-61131-3 motion-control driver:
$ sudo taskset -c 1,3 /opt/plcopen/plc_rt_amr_rtmotion
Note: By default, ECI isolates CPU cores 1 and 3 (see ECI Kernel Boot Optimizations), which is why cores
1,3are selected.Note:
/opt/plcopen/plc_rt_amr_rtmotion_symgis a sample application using EtherCAT to control the Mecanum Wheel Platform.Open a second terminal with elevated permissions:
$ sudo -i
In the second terminal, setup the ROS2 environment and run the ROS2 AGVM databus messages with IEC-61131-3 motion motion-control demo:
$ source /opt/ros/humble/setup.bash $ export ROS_DOMAIN_ID=31 $ ros2 launch agvm agvm_base.launch.py
Expected Result:
ROS2 nodes start correctly, without exiting.
Note: Since the joystick is disconnected, it is normal to see the error
[ERROR] [1657850097.527093048] [agvm_joystick_node]: Cannot open /dev/input/js0 -1!.Note: The command is correctly executed if no “Error” messages are printed (some warnings might be printed due to missing data). The following is a sample result:
[INFO] [launch]: All log files can be found below /root/.ros/log/2022-07-15-01-54-57-311770-d2d206ef9a2c-117 [INFO] [launch]: Default logging verbosity is set to INFO [INFO] [robot_state_publisher-1]: process started with pid [119] [INFO] [joint_state_publisher-2]: process started with pid [121] [INFO] [agvm_plcshm_node-3]: process started with pid [123] [INFO] [agvm_joystick_node-4]: process started with pid [125] [INFO] [ydlidar_node-5]: process started with pid [127] [robot_state_publisher-1] Parsing robot urdf xml string. [robot_state_publisher-1] Link base_link had 1 children [robot_state_publisher-1] Link base_scan had 0 children …… [agvm_plcshm_node-3] [INFO] [1657850097.490716583] [agvm_plcshm_node]: AgvmPlcShmNode initial complete. [agvm_plcshm_node-3] [INFO] [1657850097.500794279] [agvm_plcshm_node]: AGV cmd: 0.000000 0.000000 0.000000 [agvm_plcshm_node-3] [INFO] [1657850097.500855464] [agvm_plcshm_node]: AGV pose: 0.000000 0.000000 345.860687 [agvm_plcshm_node-3] [INFO] [1657850097.500876573] [agvm_plcshm_node]: AGV vel: 0.000000 0.000000 345860.687500 [agvm_plcshm_node-3] [INFO] [1657850097.500895089] [agvm_plcshm_node]: AGV mOdom: 0.000000 0.000000 34586.068726 [agvm_plcshm_node-3]
Open a third terminal with elevated permissions:
$ sudo -i
In the third terminal, setup the ROS2 environment and run the following command:
$ source /opt/ros/humble/setup.bash $ export ROS_DOMAIN_ID=31 $ ros2 topic pub -1 /cmd_vel geometry_msgs/msg/Twist "{linear: {x: -0.1}, angular: {z: -0.1}}"
Note:
linear: {x: -0.1}is the linear velocity(m/s) for AMR.angular: {x: -0.1}is the angular velocity(rad/s) for AMR.Expected Result:
Variables
AGV cmd/pose/vel/mOdomin the second terminal console will be refreshed.