Complete and Verify Deployment¶
Verify Real-time Linux Kernel¶
![]()
![]()
The section is applicable to:

Do the following to complete and verify ECI deployment:
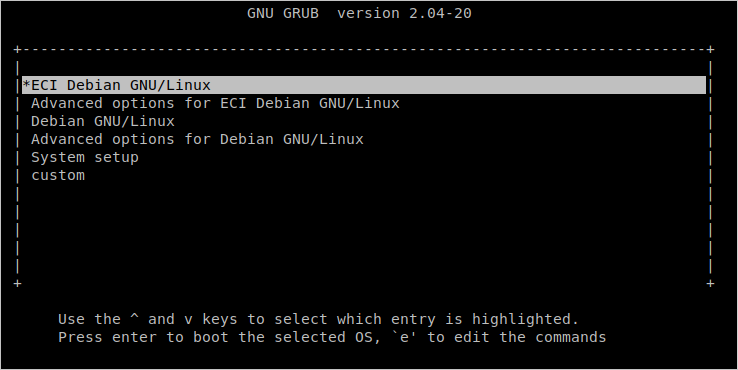
Reboot the target system, if not already done. When the system boots to the GRUB menu, there should be a menu entry for ECI at the top of the GRUB menu list. Select this menu entry, or wait five seconds for this menu entry to automatically boot.
Let the system boot normally.
Note: If the system does not boot, then secure boot may be enabled in the BIOS. You may either disable secure boot in the BIOS, or sign the Linux kernel by completing section UEFI Secure Boot.
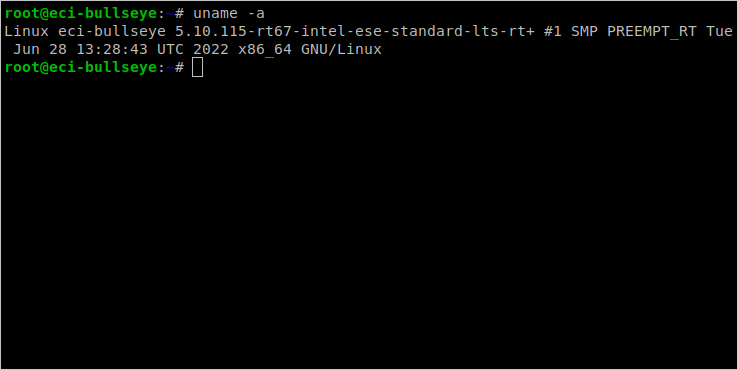
Login to the system and verify that the ECI Linux* Intel LTS PREEMPT_RT kernel is active by running the command
uname -a. The output of this command should contain the following based on which kernel was installed:Linux Intel LTS PREEMPT_RT kernel:
...-intel-ese-standard-lts-rt+ #1 SMP PREEMPT_RT ...Linux Intel LTS Xenomai Dovetail kernel:
...-intel-ese-standard-lts-dovetail+ #1 SMP PREEMPT ...
![]()
The section is applicable to:
Do the following to complete and verify deployment:
Reboot the target system, if not already done. Let the system boot normally.
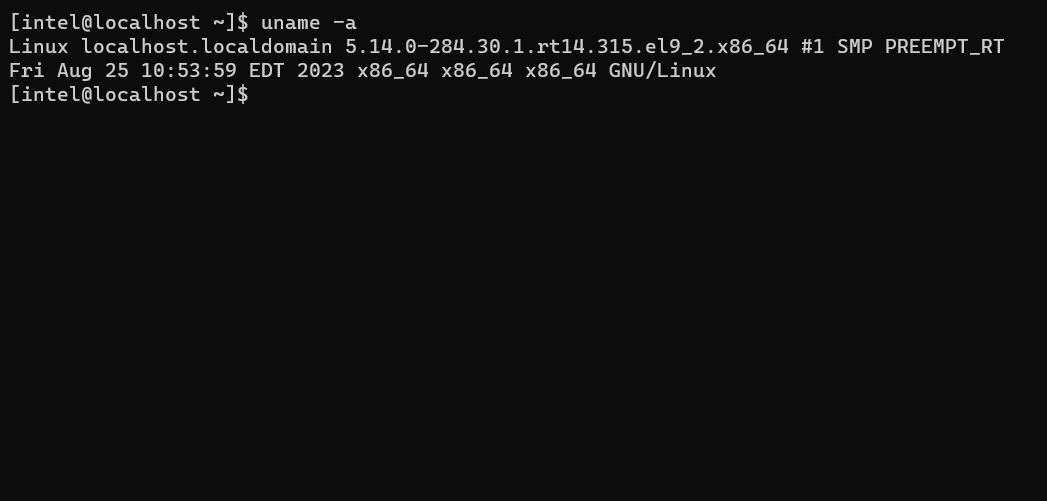
Login to the system and verify that the Linux* PREEMPT_RT kernel is active by running the command
uname -a. The output of this command should contain the following:Linux PREEMPT_RT kernel:
...x86_64 #1 SMP PREEMPT_RT ...
Install ECI Packages from Repository¶
At this point, you should be able to install most ECI packages using the package manager (APT/DNF) on this target system. Deb packages are available for Debian* and Canonical Ubuntu*, while RPM packages are available for Red Hat Enterprise Linux*. Click each tab below to learn more.
For a complete list of available ECI packages, refer to ECI Packages Lists.
![]()
![]()
The following figure illustrates some of the meta-packages (high-level Deb packages) available for Debian* and Canonical Ubuntu*:
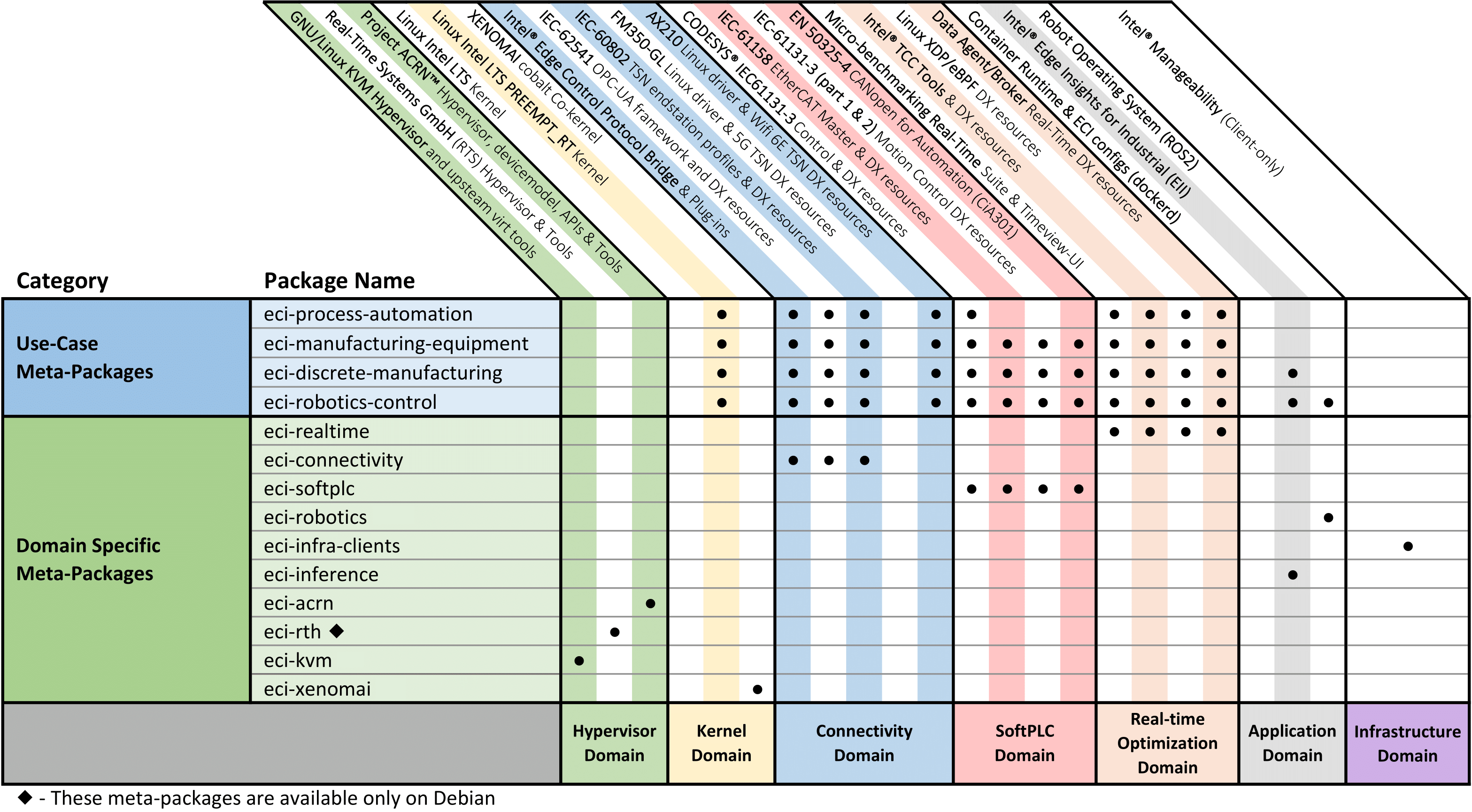
Here are some meta-packages that you could start with:
Meta-package |
Description |
|---|---|
|
Includes real-time optimization domain packages, such as benchmarks and Intel® Time Coordinated Computing. |
|
Includes connectivity domain packages for Time Sensitive Networking and industrial fieldbuses, such as Intel® Edge Control Protocol Bridge, IEC-62541 OPC UA framework, and IEC-60802 TSN. |
|
Includes software PLC domain packages, such as CODESYS* IEC61131-3, IEC-61158 EtherCAT Master, IEC-61131-3 (part 1 & 2) Motion Control, and IEC-50325-4 CANopen. |
For example, to install the eci-realtime meta-package, perform the following command:
$ sudo apt install eci-realtime
If you are installing any robotics related packages such as eci-robotics or eci-robotics-control, set up the Intel oneAPI and ROS2 APT repositories:
# download the key to system keyring $ sudo -E wget -O- https://apt.repos.intel.com/intel-gpg-keys/GPG-PUB-KEY-INTEL-SW-PRODUCTS.PUB | gpg --dearmor | sudo tee /usr/share/keyrings/oneapi-archive-keyring.gpg > /dev/null # add signed entry to apt sources and configure the APT client to use Intel repository: $ echo "deb [signed-by=/usr/share/keyrings/oneapi-archive-keyring.gpg] https://apt.repos.intel.com/oneapi all main" | sudo tee /etc/apt/sources.list.d/oneAPI.list # download the key to system keyring $ sudo -E wget -O- https://raw.githubusercontent.com/ros/rosdistro/master/ros.key | sudo tee /usr/share/keyrings/ros-archive-keyring.gpg > /dev/null # add signed entry to apt sources and configure the APT client to use ROS repository: $ echo "deb [arch=$(dpkg --print-architecture) signed-by=/usr/share/keyrings/ros-archive-keyring.gpg] http://packages.ros.org/ros2/ubuntu $(source /etc/os-release && echo $VERSION_CODENAME) main" | sudo tee /etc/apt/sources.list.d/ros2.list $ sudo apt updateAttention
If you are located in the People’s Republic of China, modify the
/etc/hostsfile to directly connect to the raw.githubusercontent server:$ sudo bash -c "echo '185.199.108.133 raw.githubusercontent.com' >> /etc/hosts"
![]()
Attention
ECI will increase support for Red Hat Enterprise Linux* in future releases. The initial Red Hat Enterprise Linux* support includes benchmarking tools Caterpillar, Real-Time Compute Performance - DPDK, CODESYS Benchmark, CODESYS OPC UA Client Benchmark, and PQoS Helper.
The following figure illustrates some of the meta-packages (high-level RPM packages) available for Red Hat Enterprise Linux*:
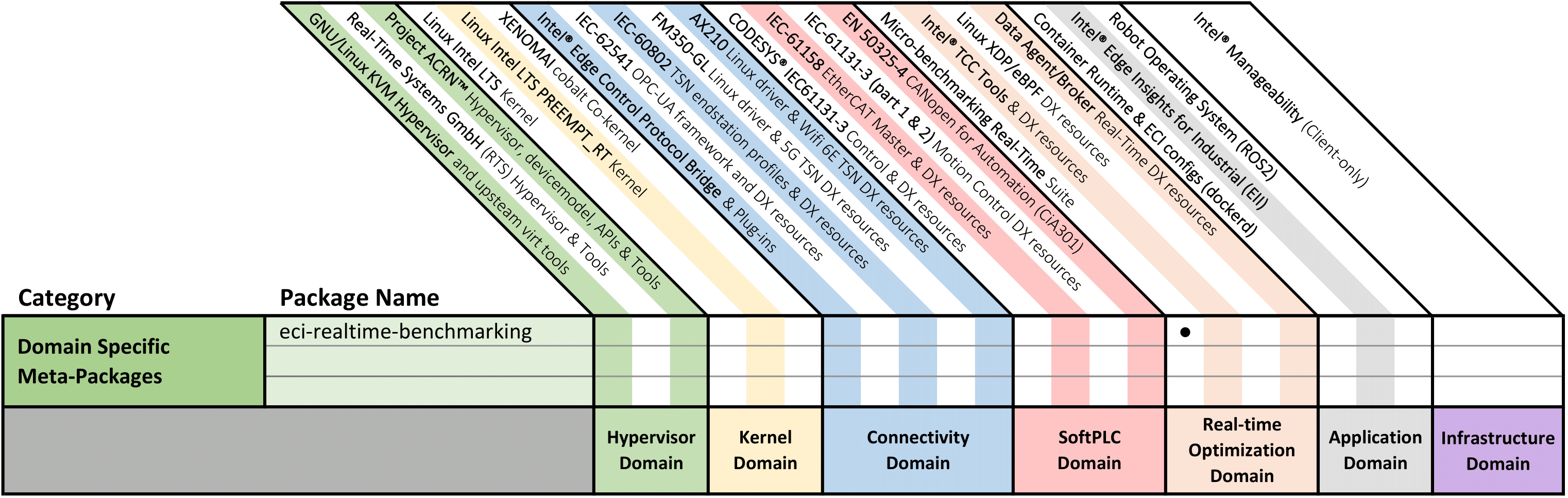
Here are some meta-packages that you could start with:
Meta-package |
Description |
|---|---|
|
Includes real-time optimization domain packages, such as benchmarks. |
For example, to install the eci-realtime-benchmarking meta-package, perform the following command:
$ sudo dnf install eci-realtime-benchmarking
Where to go Next?¶
(Recommended) Run a benchmark, such as Caterpillar, which helps to evaluate the benefits of cache allocation on a real-time OS.
For more information on the various components ECI has to offer, refer to Components and Features of ECI.
For more information on developing real-time applications using ECI, refer to Developer Resources.
Visit the Edge Controls for Industrial online support forum for questions and answers.